Affine Abbildungen 2d
Mathematik in wxMaxima www.mathematik-verstehen.de Haftendorn Jan 2011
0.1 Handling
0.2 Dieses ist das Einführungsbeispiel
0.3 Inhalt
Figure 1:
1 Urbild
1.1 Definition
Urbild
(%i18)
myUr:transpose(matrix([2,0],[2,1],[1,1],[1,3],[0,3],[0,0],[2,0],[1,1/2]));
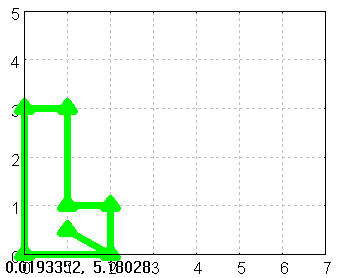
1.2 Zeichnen
(%i19) load(draw)$
(%i20) xmin:0$ xmax:7 $ ymin:0$ ymax:5$
(%i24)
urbild:gr2d(xrange = [xmin,xmax], yrange = [ymin,ymax],points_joined = true,color=green,
line_width = 7, point_size = 1, point_type = up_triangle,
grid=true,points(myUr) )$
--> draw(urbild)$
Figure 2:
2 Abbildung
2.1 Abbildung der Einheitsvektoren
(%i1)
A:transpose(matrix([3/2,1/2],[1/2,3/4]));
(%i25)
startbild:gr2d(xrange = [xmin,xmax], yrange = [ymin,ymax],
points_joined = true,color=green,
line_width = 7, point_size = 1, point_type = up_triangle,
grid=true,points(myUr) ,
grid=true, line_width=2,point_size=1, head_length=0.2,
color=blue,vector([0,0],[A[1,1],A[2,1]]),
color=black,vector([0,0],[A[1,2],A[2,2]]))$
--> draw(startbild)$
Figure 3:
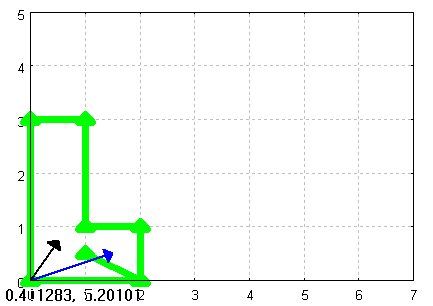
Der blaue Vektor ist das Bild des x-Einheitsvektors.
Der schwarze Vektor ist das Bild des y-Einheitsvektors.
2.2 Abbildungsgleichung für einen Punkt
Definition der Translation
(%i2) tx:3$ ty:2$
(%i4)
tv:transpose(matrix([tx,ty]));
Allgemeine affine Abbildung
(%i7)
f(xv):=A.xv+tv;

(%i8)
f(xv);
Abbildung eines beliebigen Punktes
(%i9)
pv:transpose(matrix([px,py]));
(%i10)
f(pv);
Abbildung eines konkreten Punktes
(%i11)
pv:transpose(matrix([2,1]));
Nur affine Verzerrung
(%i26)
A.pv;

gesamt
(%i27)
f(pv);
%,numer;
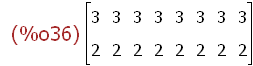
2.3 Affine Verzerrung für das ganze Urbild
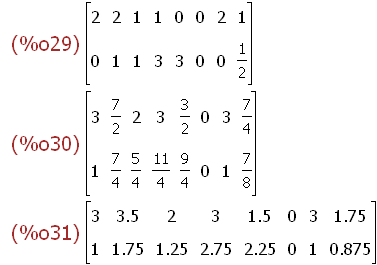
(%i29)
myUr;
myABild:A.myUr;
%,numer;
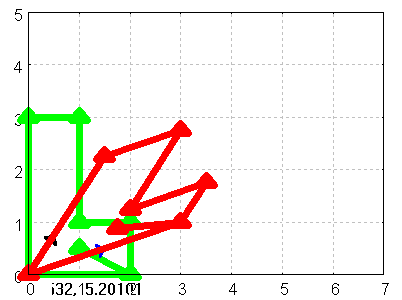
(%i32)
ABild:gr2d(xrange = [xmin,xmax], yrange = [ymin,ymax],
points_joined = true,color=green,
line_width = 7, point_size = 1, point_type = up_triangle,
grid=true,points(myUr) ,
grid=true, line_width=2,point_size=1, head_length=0.2,
color=blue,vector([0,0],[A[1,1],A[2,1]]),
color=black,vector([0,0],[A[1,2],A[2,2]]),
line_width=7,point_size=1, color=red,
points(myABild)
)$ draw(ABild)$
Figure 4:
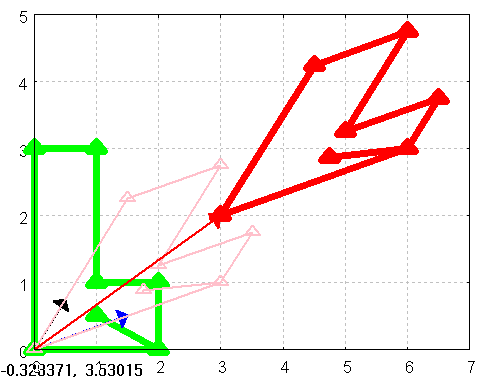
2.4 Ganze affine Abbildung für das Urbild
Nun muss zu jedem dieser Bildpunkte der Translationsvektor
addiert werden. Dazu muss man ihn passend "aufblähen" zu einer
Transformationsmatrix.
(%i34)
npk:length(transpose(myUr));

(%i35)
mtv(tv):=block ([m],
m:tv,for i:1 thru npk-1 do ( m:addcol(m,tv)),return( m))$
(%i36)
mtv(tv);
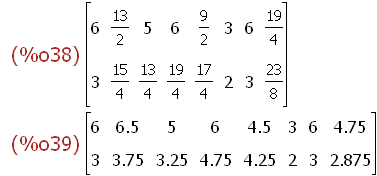
Gesamte Abbildung des Urbildes
(%i37)
fm(myUr):=A.myUr+mtv(tv);

(%i38)
myBild:fm(myUr);
%,numer;
(%i40)
Bild:gr2d(xrange = [xmin,xmax], yrange = [ymin,ymax],
points_joined = true,color=green,
line_width = 7, point_size = 1, point_type = up_triangle,
grid=true,points(myUr) ,
grid=true, line_width=2,point_size=1, head_length=0.2,
color=blue,vector([0,0],[A[1,1],A[2,1]]),
color=black,vector([0,0],[A[1,2],A[2,2]]),
line_width=2,point_size=1, color=pink,
points(myABild) ,
color=red,vector([0,0],[tv[1,1],tv[2,1]]),
line_width=7,color=red,
points(myBild)
)$ draw(Bild)$
Figure 5:
3 Eigenwerte und Eigenvektoren
3.1 Vorgefertigte Beschaffung
(%i42)
eigenvalues(A);
(%i43)
ev_all:eigenvectors(A);

Die Liste ist so zu deuten:
Erste Unterliste: die beiden Eigenwerte, dann ihre Vielfachheiten.
Zweite Unterliste: erster Eigenvektor, zweiter Eigenvektor
3.2 Beschaffung von Hand
(%i44)
A;
(%i45)
E: matrix( [1,0], [0,1]);
(%i46)
A-x*E;
(%i47)
determinant(A-x*E);
Auch dieses geht direkt
-->
charpoly(A,x);
(%i48)
solve(charpoly(A,x)=0,x);
Hier sieht man die beiden Eigenwerte.
3.3 Darstellung, geometrische Bedeutung
(%i49)
ew:ev_all[1][1]; ev1:ev_all[2][1][1];ev2:ev_all[2][2][1];
(%i54)
evBild:gr2d(xrange = [-1,7], yrange = [-2,5],
points_joined = true,color=green, line_width=2,
points(myUr),
grid=true, line_width=2,point_size=1, head_length=0.1,
line_type=dots, color=orange,
vector([0,0],[ev1[1],ev1[2]]),
color=red,vector([0,0],[ev2[1],ev2[2]]),head_length=0.2,
color=orange,
vector([0,0],ew[1]*[ev1[1],ev1[2]]),
color=red,vector([0,0],ew[2]*[ev2[1],ev2[2]]),
line_width=2,point_size=1, color=red,
points(myABild)
)$ draw(evBild)$
Figure 6:
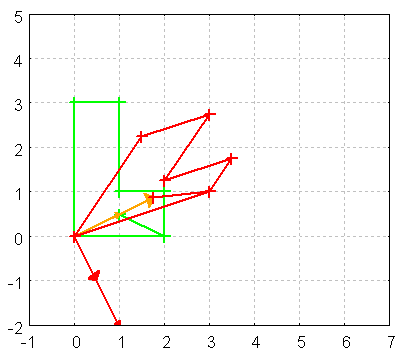
Die großen Pfeilspitzen bezeichnen die Bilder der
Eigenvektoren.
Bei dem Einführungsbeispiel sieht man, dass der eine Eigenwert
seinen Eigenvektor (orange) knapp verdoppelt *7/4, der andere
halbiert ihn (1/2).
4 Wirkung einer Linearen Abbildung
4.1 Urbild des Einheitskreises?
(%i56)
A;
(%i57)
S:A.A;
(%i61)
pt:matrix([x,y]); p:transpose(pt);ellipseS:facsum(pt.S.p=1);
(%i91)
draw(gr2d(line_width=3, color=red,grid=true,
implicit(ellipseS, x, -1.5,1.5, y, -2,2),color=blue,
implicit(x^2+y^2=1, x, -1.5,1.5, y, -2,2),
grid=true, line_width=2,point_size=1, head_length=0.1,
line_type=dots, color=orange,
vector([0,0],[ev1[1],ev1[2]]/sqrt(5/4)),
color=red,vector([0,0],[ev2[1],ev2[2]]/sqrt(5)),head_length=0.2,
color=orange,
vector([0,0],ew[1]^-1*[ev1[1],ev1[2]]/sqrt(5/4)),
color=red,vector([0,0],ew[2]^-1*[ev2[1],ev2[2]]/sqrt(5))
))$
Figure 7:
-->
charpoly(S,x);
-->
evs:eigenvectors(S);

Dies passt zur Thoerie bei symmetrischem A: Eigenwerte quadriert,
dieselben Eigenvektoren
4.2 Transformationsmatrix
-->
evs[2][1][1];
-->
Tt:matrix(evs[2][1][1]/sqrt(5/4),evs[2][2][1]/sqrt(5));T:transpose(Tt)$
-->
facsum(T.S.Tt);
Diesen Schritt braucht man nicht wirklich zu machen, denn die Theorie
garantiert hier eine Diagonalmatrix mit den Eigenwerten in der
Hauptdiagonalen.
-->
elliS:(49/16*x^2+1/4*y^2=1);
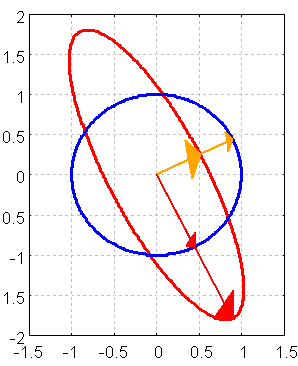
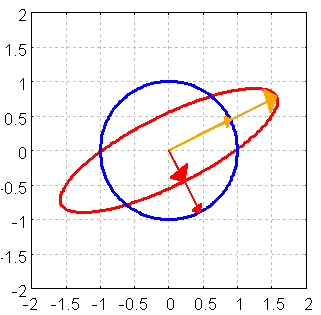
4.3 Bild des Einheitskreises
Auf welche Punkte wird der Einheitskreis abgebildet?
(%i67)
A^^-1;
Die Inverse einer symmetrischen Matrix ist symmetrisch
(%i68)
Q:A^^-2;
(%i72)
ellipseQ:facsum(pt.Q.p=1);

(%i90)
draw(gr2d(line_width=3, color=red,grid=true,
implicit(ellipseQ, x, -2,2, y, -2,2),color=blue,
implicit(x^2+y^2=1, x, -1.5,1.5, y, -2,2),
grid=true, line_width=2,point_size=1, head_length=0.1,
line_type=dots, color=orange,
vector([0,0],[ev1[1],ev1[2]]/sqrt(5/4)),
color=red,vector([0,0],[ev2[1],ev2[2]]/sqrt(5)),head_length=0.2,
color=orange,
vector([0,0],ew[1]*[ev1[1],ev1[2]]/sqrt(5/4)),
color=red,vector([0,0],ew[2]*[ev2[1],ev2[2]]/sqrt(5))
))$
Figure 8:
(%i92)
charpoly(Q,x);

(%i93)
evs:eigenvectors(Q);

Dies passt zur Thoerie bei symmetrischem A: Kehrwerte der
Eigenwerte quadriert,dieselben Eigenvektoren